32u4 Zumo - robot minisumo with controller A-Star - complex, compatible with the Arduino - Pololu 3126
- Артикул:
- 47804808
Характеристики
- UC - USB
- microUSB
- UC - A/C
- 10-bit
- UC - PWM
- 7
- UC - ядро
- 8-bit AVR
- UC - EEPROM
- 1 kB
- UC - частота
- 16 MHz
- UC - Вспышка
- 32 kB
- UC - аналог в
- 12
- Шасси + привод
- yes
- UC - Микроконтроллер
- Atmega32U4
- UC - Цифровые контакты
- 26
- UC - оперативная память
- 2,5 kB
Общие характеристики
- Тип шасси
- tracked
- Chassis + driver
- yes
Прочие свойства
- EAN
- 5904422368012
- Бренд
- Pololu
Описание
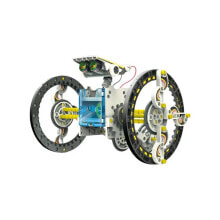
Zumo is a platform that meets the requirements of the minisumo class, that is, robots for the fight of the size 10 x 10 cm and weighting up to 500 grams. This version has a mounted chassis along with engines 75:1 HP, plough to fight and a board with an ATmega32u4 microcontroller known from Pololu A-Star. To start the game, simply insertthe batteries - four large AAA's and to program the robot by connecting it to a computer via a microUSB cable using the Arduino IDE environment.
Motherboard
A controller equipped with an ATmega32u4 system used also in Pololu A-Star boards. Programming is carried out by using the microUSB cable via the Arduino IDE environment. In addition to the microcontroller, module has i.a.: dual-channel driver of engines, voltage regulator and also distance sensors and 3-axis accelerometer and gyroscope.
What's in the kit?
The product contains essential for the normal functioning of the robot, electronic and mechanical components. The user has at his or her disposal:
- two DC motors with gear75:1 HP(400 rpm, 1.6 kg*cm),
- mounted strip with the reflective sensors - to sense the edges of the ring (dohyo),
- integrated driver of motors - dualbridge H DRV8838,
- generator of simple sounds -piezoelectric buzzer,
- 3-axis digital accelerometer with magnetometer LSM303D - it can be used as a system for detecting the collisions with opponents,
- 3-axis digital gyroscope theL3GD20H - to measure the angular velocity (sensing the rotation of the robot),
- button for a user's disposal, is connected to lead number 12 of the Arduino that can be used, for example, to select the starting mode
- Converter stabilizing the voltage from four AA batteries,
- detaileduser manual available on-line,
- Arduino libraryfor all the, above listed, electronic components.
The Zumo robot has been designed in such way that the outline of the assembled structure was placed in a square of 10 x 10 cm, what is consistent with the international regulations related to the fights of robots.
Additional items
Base board give the ability to connect various additional elements. The user can use, for example, a sensor to detect the opponent on the ring. Optical sensorsorultrasonic sonars can be used to achieve this.
Useful links
- The website of the manufacturer: Pololu 3126
- Drivers of Pololu A-Star
- The Arduino Library
- User manual Zumo
- 3D model robot
- The scheme of a base board
- Description of leads of base board
- Documentation of Sharp GP2S60
- Documentation of the accelerometer LSM303D
- Documentation ofgyroscope L3GD20H
- Documentation of the IR receiver TSP77038
- Documentation of the driver DRV8838